【摘要】: 针对当前液态施肥机在液肥的精确及定量控制等方面存在的不足,以单片机作为控制核心,采用投入式液位传感器进行数据采集,将液位的变化转换成电压变化,再利用A / D 将模拟量转化成数字量;同时,通过单片机处理将电压值换算成相应的液位高度值及容量值并显示,并用MatLab 分析试验数据。结果表明: 液位高度值各容量值测量误差均满足实际要求,可应用于液态施肥机。
【引言】
液位包括液位信号器和连续液位测量两种。液位信号器是对几个固定位置的液位进行测量,用于液位的上、下限报警等;连续液位测量是对液位连续地进行测量,广泛应用于农田灌溉、定量施量、高炉冲渣水位测量、环境监测等农业生产领域,具有非常重要的意义[1]。目前,对液位测量的精度要求不仅愈来愈高,且需要测量仪能够适应一些特殊环境,如高温、高压、强放射性及强腐蚀性等条件。液态肥因其生产费用低、肥效高、易吸收、节支增产效果显著及施用过程中可以根据需要加入土壤所缺少的植物营养元素等优势迅速得到了广泛应用[2]。而变量施肥作为精准农业的重要部分,其技术基础就是对液肥液位的精准控制。目前市场上,液位控制系统大致可分为以下两种[3]:
1)机械式控制系统。机械式控制系统结构简单、成本低廉;但这种控制装置故障多、误动作多,且只能单独控制,与计算机进行通信较难实现。
2)交流调压/ 变频调速控制系统。该系统是通过安装在水泵出口管道上的压力传感器,把出口压力变成标准工业电信号的模拟信号,经过前置放大、多路切换、A/D 变换成数字信号传送到单片机,经单片机运算与给定量的比较,进行PID 运算,得出调节参量;经由D/A 变换给调压/变频调速装置输入给定端,控制其输出电压变化,来调节电机的转速,以达到控制水位的目的。
本文以液态施肥机为依托,针对一定体积的液肥进行液位试验,通过以单片机和投入式液位计为主要硬件资源设计硬件电路,画出相应的软件流程图进行测试。数据分析验证表明:该传感器在液肥液位测量中安装维护方便,能适应液肥这种特殊环境,其容量和液位高度的测量误差也满足实际要求。
1 系统工作原理及组成
微压式液位计采用的是压力敏感元件实现力-电转换。传感器的液位量程是0 ~ 1. 3m,且这段量程液位所对应的深度约合压力相比其他要小很多,因而称其为“微压式”。本系统是所选的正是微压式传感器,它将液位信号转换为4 ~ 20mA 标准电信号输出。
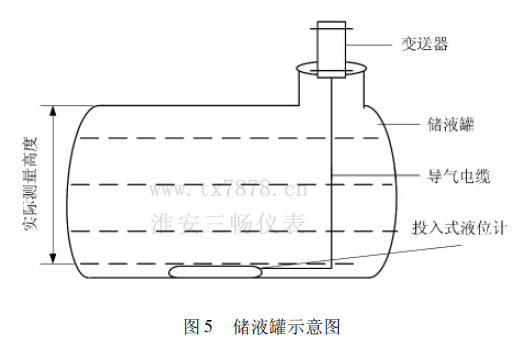
若设所测液体密度为ρ ,液位高度为h ,大气压为ρ0,重力加速度为g ,则液体所受压力p = ρgh + ρ0 。这时,为抵消大气压力变化所带来的测量误差,传感器变送器部分采用导气电缆将大气压力ρ0引入敏感元件的负压腔,进而使p = ρgh 。显然,若已知液体密度,通过测取压力p 就可换算出相应的液位高度。
1. 1 单片机选型
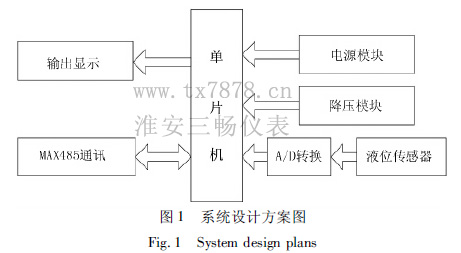
该系统结构相对简单、运行速度快,考虑到功能和成本兼顾,采用以扩展性51 系列单片机STC12C5412AD 为核心控制元件。该芯片具有12kB用户可自行安排的FLASH 及FEPROM 空间比例;在同样的工作频率下,平均指令运算速度是普通8051的8 ~ 12 倍[4],满足系统对数据处理的要求,且掉电模式可由外部中断唤醒,适用车载信息系统。系统设计方案图如图1 所示。
1. 2 投入式液位计选型
对液位的测量选用管家婆168彩图生产的SC-500系列。其基于所测液体静压与该液体的高度成比例的原理,再将静压转换为电信号,实现非电量到电量的变换,利用这一特性来完成对液位的测量。主要技术参数如下:量程1. 3m,精度0. 5%Fs,电压18 ~ 36VDC,输出4 ~ 20mA。
其优点包括:①能实时测量罐内各点液位;②直流4 ~ 20mA 标准电流信号输出;③密封性好,测量元件不与液肥直接接触,避免了液肥对元件的腐蚀。
2 硬件电路设计
2. 1 电源电路设计
电源电路图如图2 所示。图2 中,为了保证液位传感器能获得24V 的直流供电,选用具有DC - DC 单片控制电路功能的MC34063 芯片,片内包含有温度补偿带隙基准源,能输出1. 5A 的开关电源,且是使用最少的外接元件构成的升压变换器、降压变换器和电源反向器[5]。
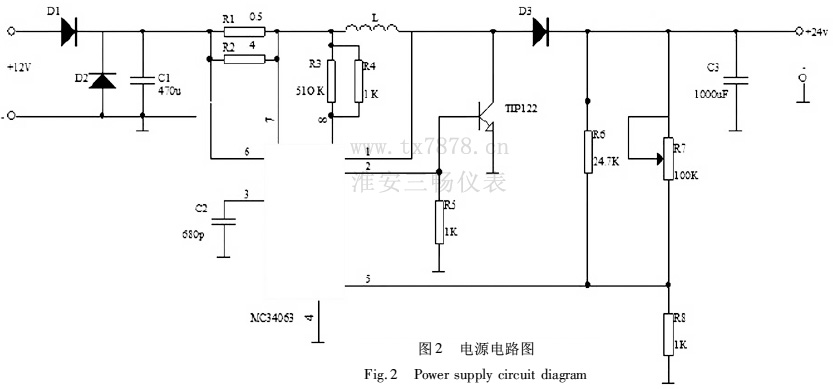
本系统电源电路采用具有升压转换作用的MC34063 芯片,与电感L、二极管D3、三极管TIP122一起构成电源电路。若TIP122 导通时,+ 12V 的输入电压经采样限流电阻R1、R2,流经电感L,随着电感L电流增加,其两端进行储存能量。此时,二极管D3是
防止电容C3对地放电,并由电容C3向负载供电;若TIP122 断开时,电感L 及12V 的输入电压对电容C3充电的同时电容C3对负载供电,负载电压稳定在+ 24V,稳压的负反馈信号是电阻R7、R8的分压输入到MC36063 的5 脚。
2. 2 检测电路设计
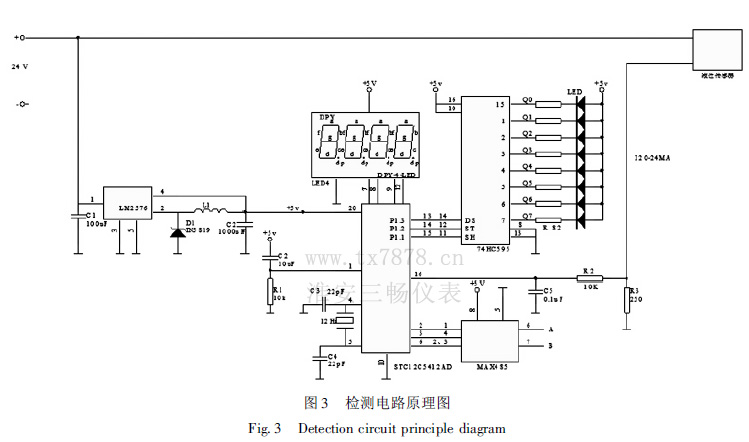
硬件部分的核心为STC12C5412AD,工作电压由LM2576 从24V 转变为5V 来提供。同时,用MCU 的3 个输出引脚P1. 1、P1. 2、P1. 3 连接串并转换芯片74HC595,就可实现对系统所有的显示功能及显示元件的控制。图3 中的74HC595 芯片Q0 ~ Q7 共8 位输出控制8 个发光二极管,每个二极管分为闪、亮2段,共16 段,通过灯的闪亮和4 个数码管显示的罐内液体容积值来记录相关液位数据。其检测电路原理图如图3 所示。
3 系统软件设计
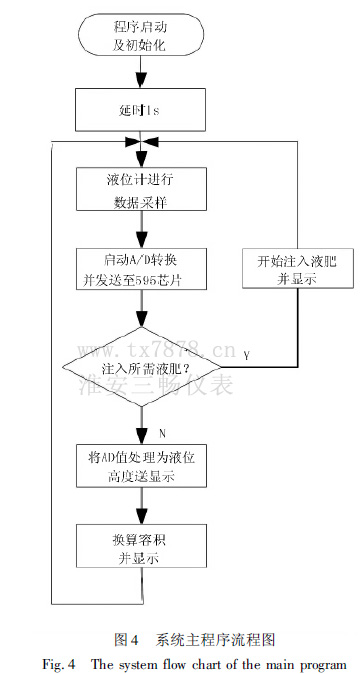
系统软件是利用51 系列单片机集成开发工具来进行C 语言设计,采用模块化设计方式,由系统与监控程序一起管理执行。系统软件主要由主程序、初始化程序、定时中断处理程序组成。其中,系统主程序包括A/D 转换子程序及显示子程序。系统初始化后进入主循环,定时中断处理程序是对74HC595 的输出进行控制。系统主程序流程如图4 所示。
4 数据测试及分析
4. 1 测试条件
为验证本设计的可行性,基于所测液体静压与该液体的高度成比例,再将静压转换为电压的试验原理,搭建实际的电路。用现有的播种机储液罐作为容器可容纳近1 000L 的液体。其实际测量高度如图5所示。因液肥与水密度相近,所以用水作为测试对象,在正式用液肥时验证误差,算出修正系数,再写入单片机中进行校正。
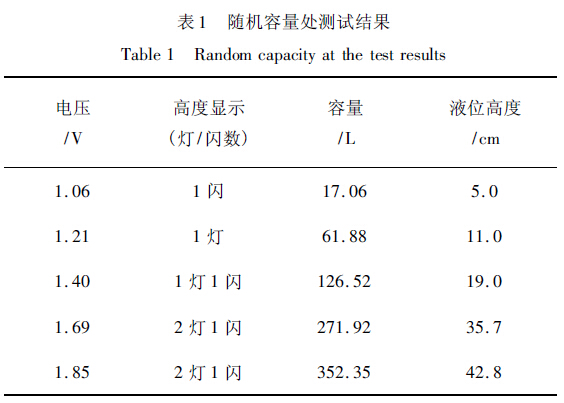
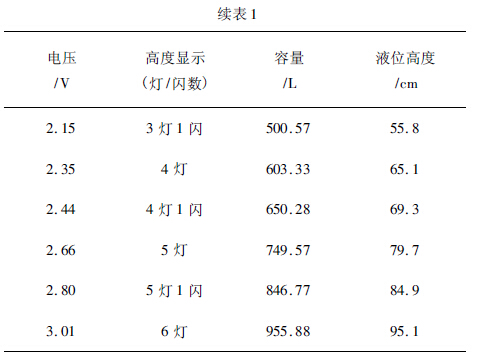
首先将液位计正确安装于储液罐底部,接通电源后利用串有流量计的电泵开始注水,注意观察液位的变化,待快到预先暂定的水容量处关闭电源。此时,用万用表读取液位计处理后的电压值、记录表示高度显示的LED 的灯/闪数及流量计显示的实际注水容量,再用米尺丈量水的实际液位高度。试验结果如表1 所示。
4. 2 数据分析
观察表1 的数据之间存在某种线性关系,用Mat-Lab 对表1 的压力与容量及液位高度数据进行一次曲线拟合,如图6 所示。
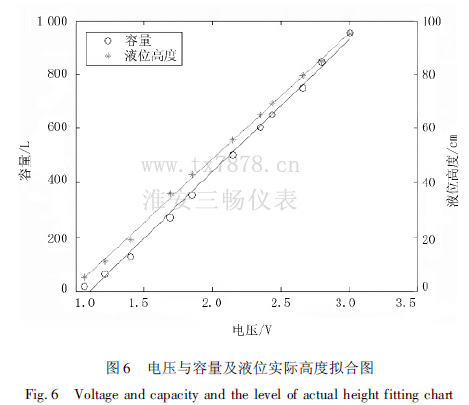
根据图6 的拟合曲线,可得到对应的回归方程为
其中,x 代表电压; y1为容量; y2为液位高度。
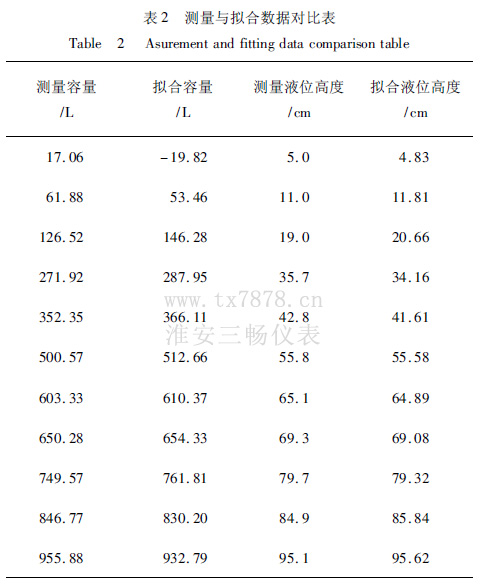
由此可见:电压与容量及液位高度之间确实存在良好的线性相关性,且从表1 中也可以看出LED 灯的亮、闪数随液位高度而变化。因此,一旦配比好定量的液肥,在变量施肥机工作时,可以根据LED 灯来判断其液位高度,用数码管来显示其容量。分析对比表2 的数据可知:液位高度误差在允许范围之内,拟合容量的负数除了与传感器的安装位置及储液罐的形状有关以外,和换算容量的基点(零点)也相关。因此,可以重新选一个容量和高度基点来解决。
5 结论
以STC12C5412AD 单片机为核心的液肥检测系统,可以动态地显示液位及容量的变化,实用性较强,且成本低廉。在随机的测量试验中,节省了人力及物力,同时也提高了检测的效率。该投入式液位计体积小巧、使用方便、维护成本不高,优于其他如超声波传感器。试验数据分析表明:该微压传感器性能指标能满足较高精度要求的测量,为液肥播种机的进一步智能化奠定了一定的实践基础,对其它的液位测量也具有较好的借鉴作用。
参考文献:
[1] 安宗权,冷护基,林宗良. 储罐液位检测技术的现状与展望[J]. 芜湖职业技术学院报,2005,7(4):9 - 10.
[2] 郞春玲,王金武,王金峰,等. 深施型液态变量施肥控制系统[J]. 农业机械学报,2013,44(2):43 - 47.
[3] 陈霞,白小军. 基于单片机的液位监控系统[J]. 武汉理工大学报:信息与管理工程版,2007,29(3):38 - 41.
[4] 史小楠. STC12C5410 /12C2052 系列单片机简介[J]. 实用电子制作,2007(1):24 - 25.
[5] 郭忠银,高飞燕. 基于MC34063 的开关电源设计[J]. 工业控制计算机,2001,23(2):100 - 101.
相关文章推荐:投入式液位计的工作原理、