摘 要:为提高磁致伸缩液位计的信噪比和稳定性,消除杂波对液位计测量准确性的干扰,以量程小于2m的微型磁致伸缩液位计为研究对象,设计了二阶有源带通选频放大电路,并利用Multisim软件进行仿真分析,论证了该调理方案提高微型磁致伸缩液位计感应信号信噪比和抗干扰性的可行性。QDl压力变送器_差压变送器_液位变送器_温度变送器
引言
随着现代电子技术的飞速发展,自动化程度越来越高,使得
磁致伸缩液位传感器应运而生。该类型传感器技术新颖,相较于其它传感器减少了人工参与带来的随机误差,广泛应用于非接触、高精度、现场环境恶劣的场合[1-3]。感应信号是磁致伸缩液位传感器实现物位精que测量的根本,通常磁致伸缩液位传感器工作现场环境复杂,电磁干扰噪声较大,该噪声在波导丝上反射,被超声换能器拾取,在上位机上表现为测量数据失真或跳变。目前,针对该情况的解决方案是采用锗二极管限幅来滤除干扰杂波,然而对于感应信号质量和稳定性的优化等方面尚无探索。本文以量程小于2m微型磁致伸缩液位传感器感应信号为研究对象,设计了二阶有源带通选频放大电路。
1磁致伸缩液位传感器原理
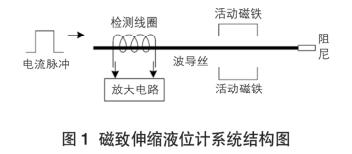
磁致伸缩液位传感器由金属电子仓、Fe-Ni合金波导丝、探测杆、衰减阻尼等组成(如图1所示)。液位传感器工作时,由脉冲发生电路产生一个周期性的大电流窄脉冲加载到波导丝上。由楞次定律可知,在驱动脉冲的作用下,周围空间会产生一个垂直于波导丝的环向磁场,环向磁场与活动磁铁产生的轴向磁场相遇时互相叠加产生螺旋形磁场。根据魏德曼效应[4-7],该螺旋形磁场使波导丝在活动永磁体处发生扭转形变,形成弹性机械波沿波导丝向两端传播,到达液位传感器底部的弹性机械波被衰减阻尼吸收,到达顶端的弹性机械波被超声换能器拾取。由维拉利效应[8-10]可知,波导丝形变会让磁致伸缩材料的磁导率发生改变。根据法拉第电磁感应定律,超声换能器可拾取变化的磁场产生的电压信号从而实现测量物位的目的。
2磁致伸缩液位传感器感应信号分析
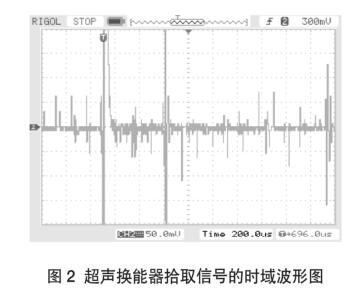
本文采用Tektronix公司生产的型号为TCS 2024C的示波器,其带宽为200MHz,采样率高达2GS/s,采样频率为100MHz,采样点数为10000个。观察超声换能器拾取信号经放大后的时域波形(如图2所示),发现感应信号混杂着干扰信号。经分析,可知感应信号是混频信号,目标信号主要集中在150kHz以下,50kHz附近达到峰值,同时还有一些高频干扰的成分,在示波器上表现为时域波形上的毛刺。这些噪声对感应信号的数字整形影响较大,严重影响了液位传感器测量的准确度和稳定性。
3、二阶有源带通选频电路设计
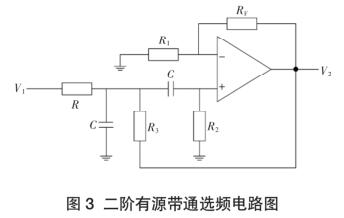
二阶有源带通选频电路如图3所示。设R2=2R,R3=R可导出该电路的传递函数为:
式中,AVF为同相比例放大电路的电压增益。为了使电路稳定工作,要求AVF<3。
式(3)为二阶带通选频电路传递函数的表达式,其中ω0既是特征角频率,也是该带通选频电路的中心角频率。令s=jω,则有:
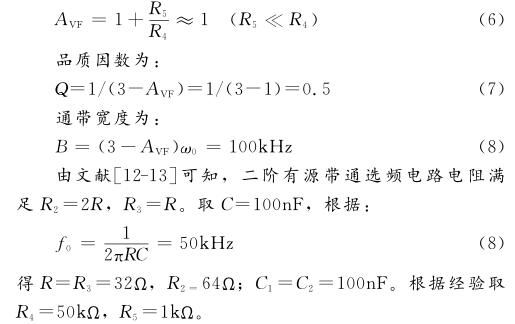
由式(4)可知,当ω=ω0时,图4所示电路具有#大电压增益。Q值越大,则通频带越窄,即选择性越好。一般将|A(jω)|下降至A0/??2时所包含的频率范围定义为通带宽度,有:B=(3-AVF)ω0(5)
由上述分析可知,磁致伸缩感应信号为交流信号,其中心频率为50kHz。试验中选用OP37A集成运算放大器进行信号处理,其带宽增益为60MHz,并具有优于一般运放的低噪声特点。设计方案如下。
(1)技术参数:工作频率ω0为50kHz;-3dB频带宽不大于100kHz。
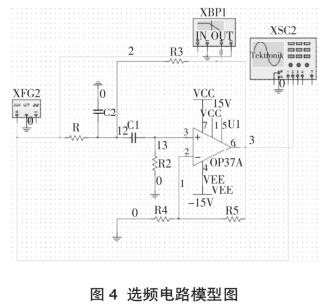
(2)设计选频电路:OP37A开环增益大于120dB,输入阻抗ri为3GΩ,输出阻抗ro为70Ω。由于该电路工作于50kHz的固定频率附近,因此采用具有良好选频滤波效果的二阶带通选频电路,如图4所示。
选频电路的闭环增益应满足:
4放大电路设计
本文采用晶体管搭建负反馈放大电路,该电路将NPN晶体管的共发射极放大电路与PNP晶体管的共发射极放大电路串联,用电阻将反馈从电路的输出加到初级NPN晶体管的发射极[14]。设计方案如下:
(1)技术参数:信号经选频电路后,幅值保持不变,输入10mV,输出大于2V。
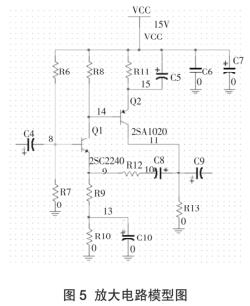
(2)设计负反馈放大电路:电源电压是15V,所以选择集电极-基极间#大额定值VCBO与集电极-基极间#大额定值VCEO在15V以上的晶体管。本文选用常规通用小信号晶体管2SC2240(东芝)和2SA1020(东芝))。放大电路模型如图5所示。
(3)参数确定:设Q1发射极上所加的电压为2V(若不在1V以上,则发射极电流的温度稳定性变差)。忽略晶体管的基极电流,则IE1=IC1。令IE1=IC1=1mA,则有:
R8的取值越大,Q1的共发射极电路的增益就越大,然而Q2的基极是直接连接到Q1的集电极上的,R8增大,其上的压降也变大,因此取R8上的压降IC1×R2=5V,则:
令VBE=0.6V,则加在R4上的电压为4.5V。设Q2集电极电流IC2为3mA,由IC2≈IE2,得:
为了使Q2发射极电流为1mA,由R9+R10=2kΩ得R10=2kΩ-100Ω≈2kΩ。
5仿真分析
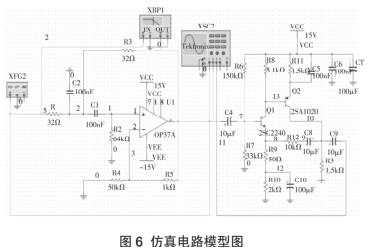
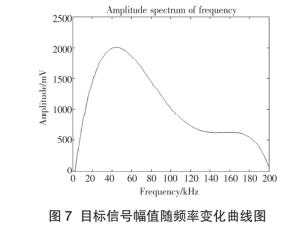
本文采用Multisim10进行仿真,在绘图编辑器中选择信号源XFG2、直流电源VCC等[15-16]。其中,波特仪XBP1用来分析感应信号的中心频率和-3dB的通带宽度;XSC2为四通道示波器,CH1通道接入信号发生器,CH2通道接入选频电路输出端,CH3接入放大电路输出端,以观察输入输出信号的波形。仿真电路模型如图6所示。将信号源设置为10~190kHz,步长为20kHz,幅值为0.01V。启动Multisim 10,点击运行按钮,将采集的数据进行多项式拟合,二阶有源带通选频放大电路输出电压幅值随频率变化如图7所示。
由图7可知,二阶带通选频放大电路中心频率为50kHz,输出电压幅值达到#大,和式(4)中的分析结论一致,满足了设计要求。将波特仪的输入端接在信号源XFG2的正端,输出端接在选频电路的输出端,负端共地。设置信号源工作频率为50kHz,计算该二阶有源选频放大电路-3dB通带宽度为B=73.813-21.911≈52kHz,与理论分析相符。
6实测结果
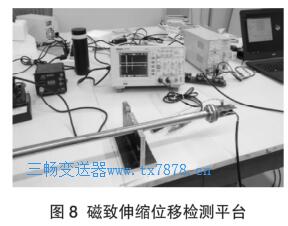
为验证磁致伸缩位移传感器感应信号的调理方法,参照上面所述的测量结构,根据设计的感应信号选频电路和放大电路进行测试。测试条件:波导丝长度为2m,单个永磁体位移浮球,环境温度为25℃,采用12V直流稳压电源供电。磁致伸缩位移检测平台如图8所示。
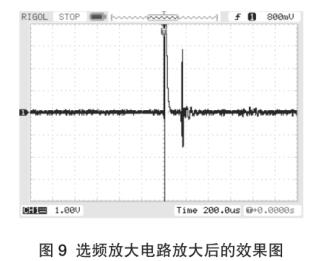
由选频放大电路放大后的效果图(如图9所示)可知,二阶有源带通选频放大电路能有效平滑信号并提高信噪比,减少对信号整形计数的影响。
7结语
本文针对磁致伸缩液位传感器在复杂工况下环境噪声对感应回波信号产生的干扰问题,提出了相应的传感器感应信号调理方案,包括抗干扰的二阶有源带通选频滤波和目标信号放大处理,并分别通过试验验证了该调理方案能提升信号的信噪比及系统的稳定性。同时,该放大电路采用晶体管搭建,避免了运算放大器级联造成的噪声放大,简化了选频放大器的设计,并提高了选频放大器的性能,节约了生产成本,在实际运用中取得了良好效果。
注明,三畅仪表文章均为原创,转载请标明本文地址